Fully Autonomous Low-Cost Lawnmower
A sub-$300 award-winning autonomous lawnmower capable of 2D SLAM and obstacle avoidance.
The Problem
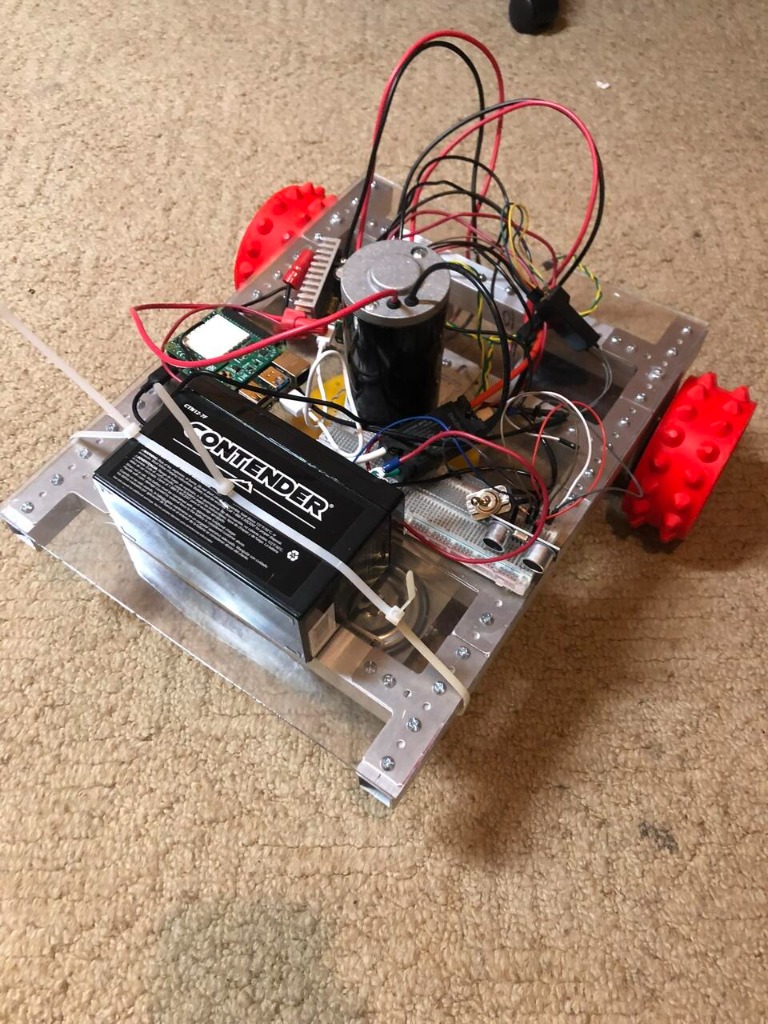
My dad wanted me to cut the lawn every week, which took 2 hours, so I built this robot in 2 weeks and never cut the lawn again. I designed and built a fully autonomous lawnmower from scratch using a custom-designed 3D-printed chassis. The system integrates LiDAR, ultrasonic sensors, gyros, and OpenCV cameras for comprehensive obstacle avoidance. I engineered the control system using a Raspberry Pi and Arduino, implementing ROS 2 and 2D SLAM algorithms to enable autonomous operation without manual intervention. The project received national and state-level recognition for achieving a sub-$300 build cost, significantly lower than the $4,000 price point of commercial equivalents. You can watch a full video breakdown of the build on my YouTube channel.
Approach
The core of the solution involves a custom pipeline built with Python, ROS 2, Raspberry Pi, Arduino, OpenCV, 3D Printing. I prioritized modularity and performance, ensuring the system can run in real-time constraints.
Results