Yash Kakade
Engineering Applied Science Junior at Caltech
Hey! I’m Yash, a third-year undergrad at Caltech studying Electrical Engineering with a focus on Intelligent Systems. I’m advised by Prof. Babak Hassibi.
Broadly, I’m interested in embodied intelligence at the intersection of hardware, perception, and learning-based control. My work spans robotics, computer vision, motion capture, and reinforcement learning, with a strong emphasis on real-world deployment. At Caltech, I work on humanoid locomotion using reinforcement learning in the AMBER Lab. In parallel, I conduct perception and robotics research with Relativity Space, focusing on high-precision sensing, motion capture, and digital twin systems for aerospace applications.
I’ve previously worked as a robotics and computer vision intern at AFRL developing ROS2-enabled digital twins and perception systems for autonomous robots, as well as a Robotics Software Engineering Intern at Relativity Space, and briefly conducted machine learning research in the Wierman Group at Caltech on adversarial robustness in CNN-based perception.
ykakade [at] caltech [dot] edu
Selected Projects
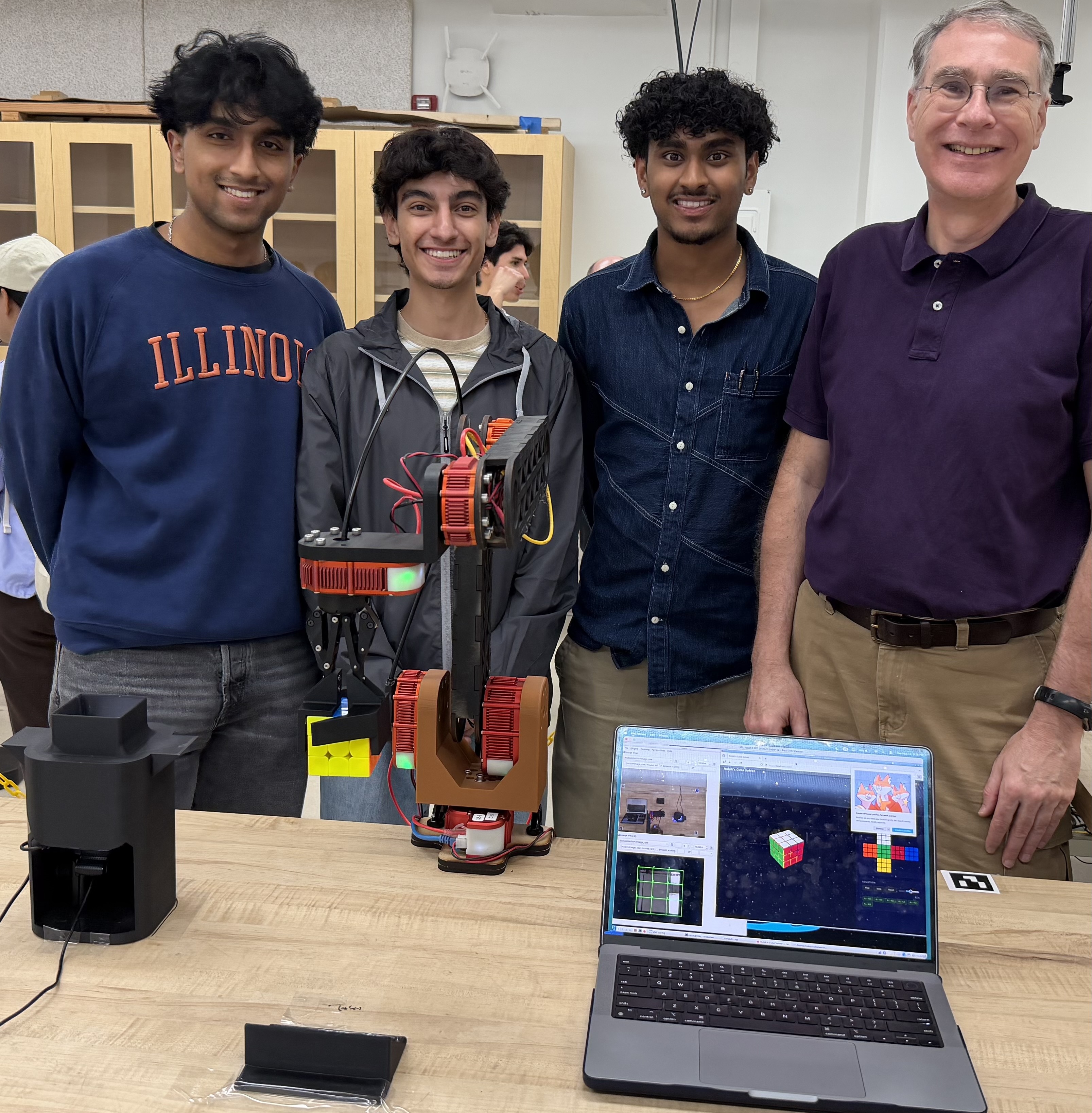
Autonomous Rubik's Cube Solving Robot
A 6-DOF robot arm that autonomously scans, solves, and executes moves on a physical Rubik's cube using computer vision and a custom manipulation pipeline.
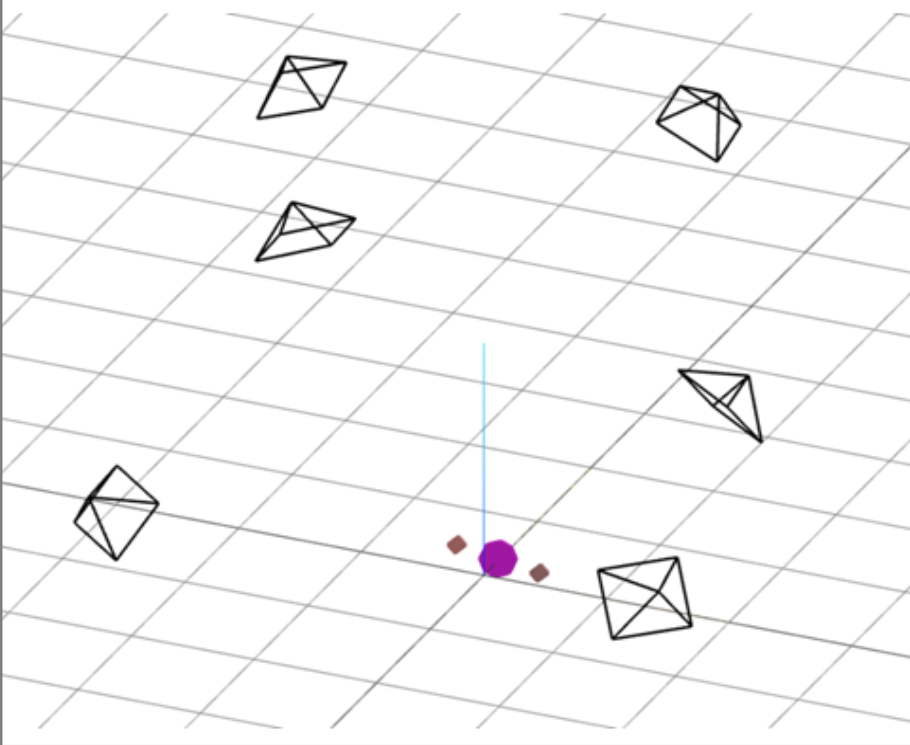
Camera-Only Motion Capture System
Self-healing calibration and rigid-body tracking system requiring only standard cameras.
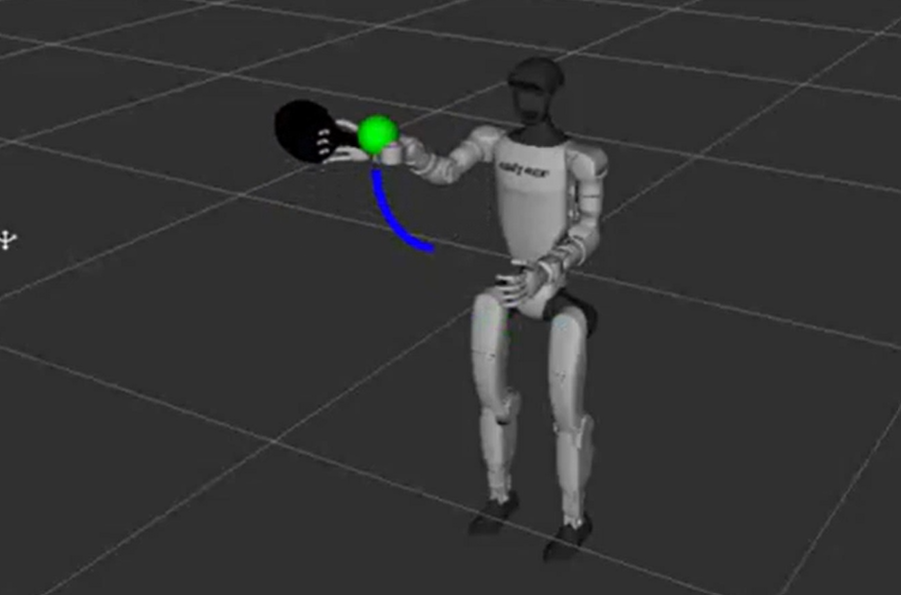
Humanoid Tennis Manipulation
Autonomous tennis system with a 29-DOF humanoid using hybrid IK and whole-body control.
Universal Object Tracking & Digitization
Automated digital twin pipeline with high-accuracy object detection for Boston Dynamics Spot.
Fully Autonomous Low-Cost Lawnmower
A sub-$300 award-winning autonomous lawnmower capable of 2D SLAM and obstacle avoidance.
Current Focus
Balancing engineering, research, and studies at Caltech.
Relativity Space
Robotics Software Engineering Intern
Caltech
Undergraduate Researcher
California Institute of Technology
GPA: 3.7/4.0B.S. Electrical Engineering (Intelligent Systems) and Business, Economics & Management (BEM)