Camera-Only Motion Capture System
Self-healing calibration and rigid-body tracking system requiring only standard cameras.
The Problem
I built this system entirely from scratch, utilizing Structure from Motion (SfM) theory and applying it at a fundamental level to address the challenges of handling uncertainty and real-world noise in robotics. The core of the solution involves a custom pipeline built with Python, OpenCV, and Optimization that prioritizes modularity and performance to ensure execution within real-time constraints. Key features include autonomous hands-free calibration, robust occlusion handling, and a self-healing capability that allows the system to automatically recover and recalibrate if a camera is bumped or moved. Note that the code is not open source as it is proprietary to Relativity Space.
Approach
The core of the solution involves a custom pipeline built with Python, OpenCV, Optimization. I prioritized modularity and performance, ensuring the system can run in real-time constraints.
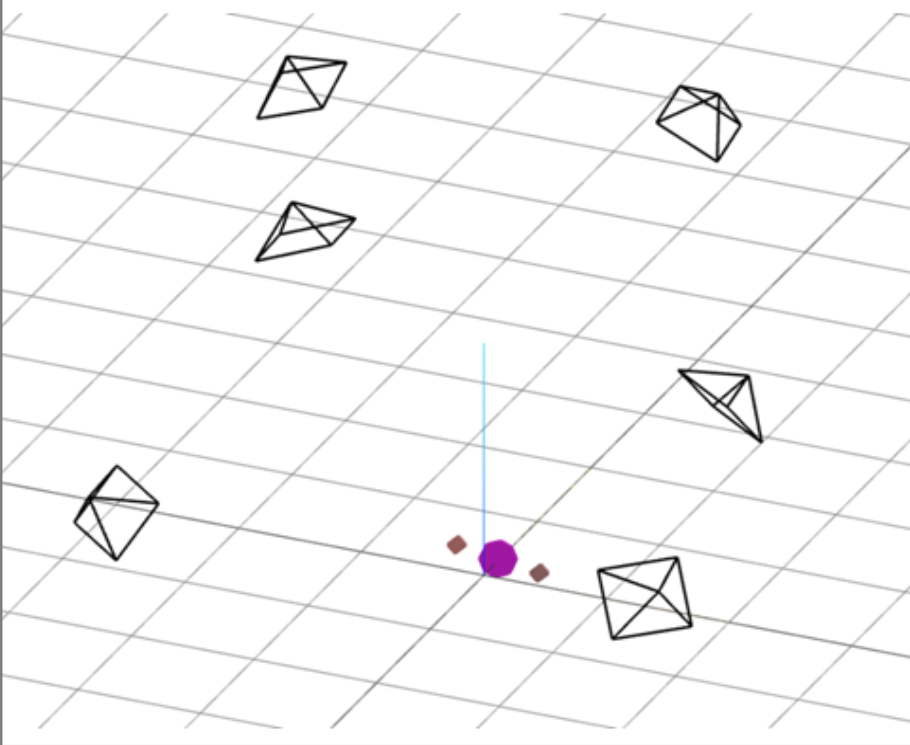
Results