Collaborative Dual-Robot SLAM
Collaborative SLAM system where two robots autonomously explore and map a Mars-like environment.
The Problem
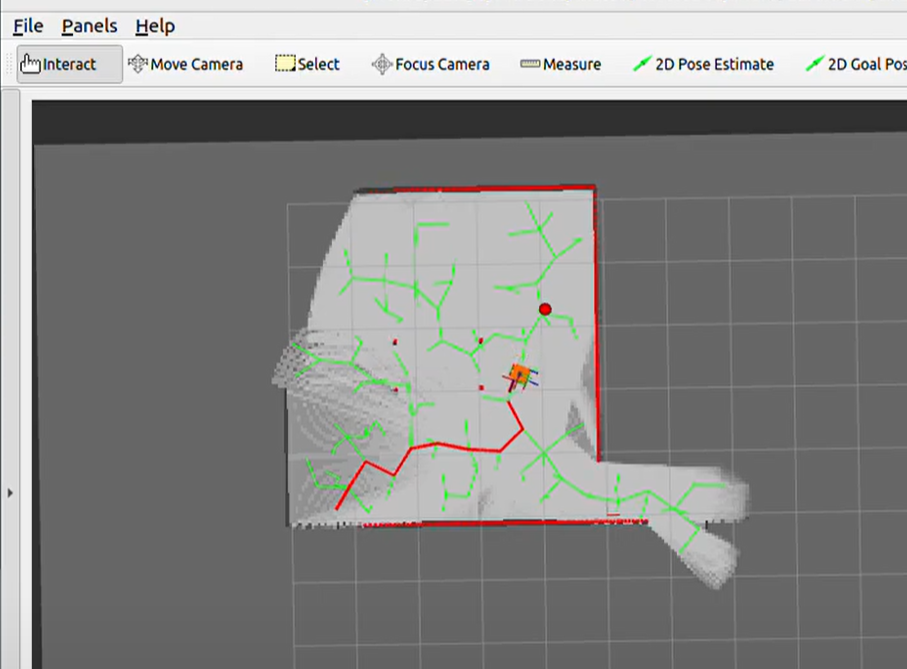
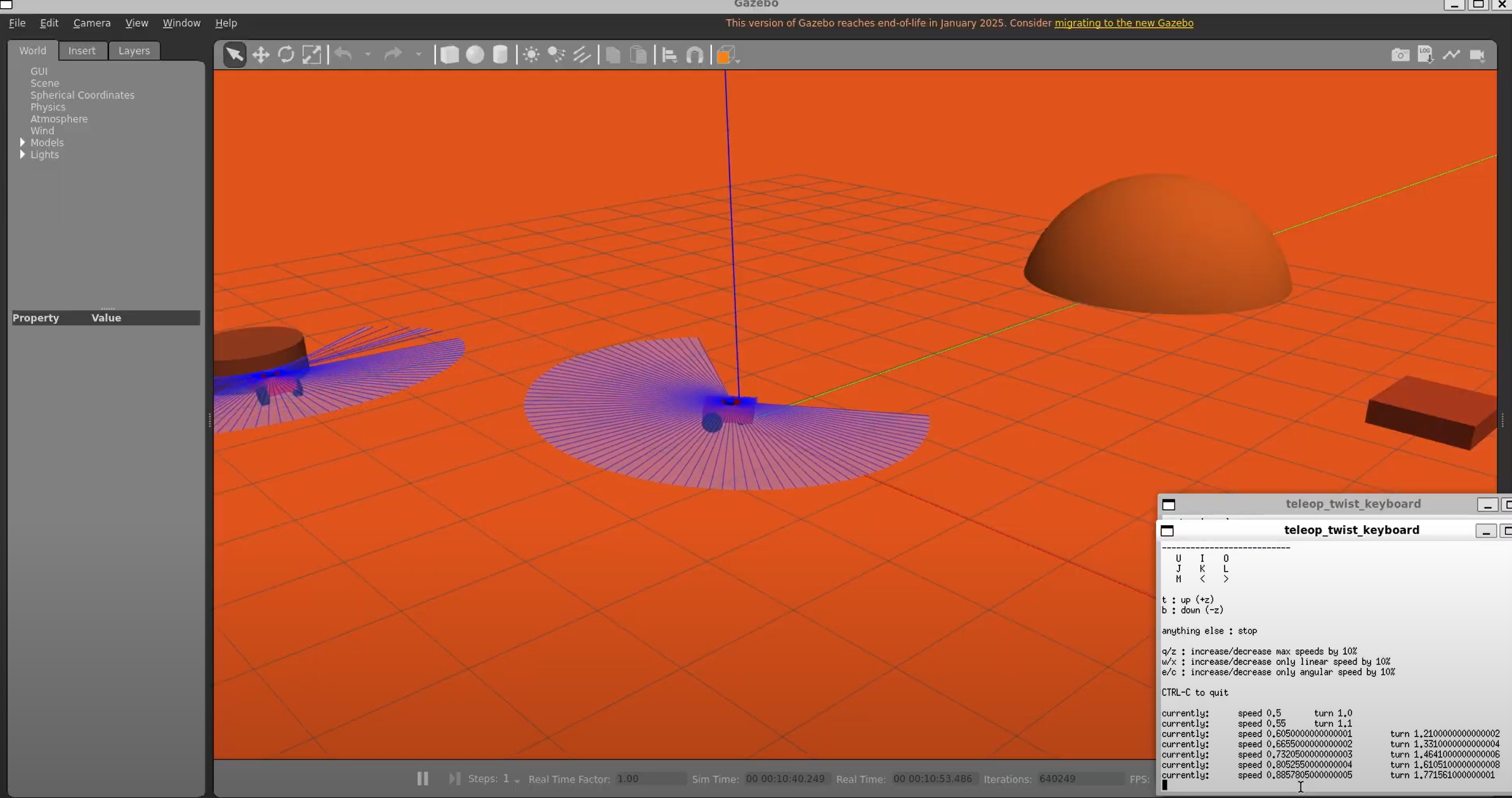
We implemented a hybrid central-distributed architecture in ROS 2 to enable two robots to autonomously map a Mars-like environment. The core of our system is a centralized SLAM node that fuses LiDAR scans from both rovers into a single probabilistic occupancy grid using a log-odds mapping approach. This required careful management of the TF tree to localize each robot (e.g., `/robot1/base_footprint`) within the shared global frame. For exploration, we developed a specialized Rapidly-exploring Random Tree (RRT) algorithm that biases node selection based on a custom cost function maximizing the Euclidean distance from visited regions to prioritize unexplored frontiers. The system leverages strict namespace isolation and tuned QoS policies to ensure reliable high-frequency sensor data synchronization for real-time consistency.
Approach
The core of the solution involves a custom pipeline built with ROS 2, Python, Gazebo, Nav2, RViz. I prioritized modularity and performance, ensuring the system can run in real-time constraints.
Results